Proposed solution should allow detect man controlled and autonomous flying vehicles in surrounding space, compute their position, trajectory and speed. From smaller distance should be possible recognition of type and model of flying vehicle as well as identification of nationality symbols, military or civil signs and weapons hanged below the wings.
An advantage of optical solution is in its passive character. Thanks that such system is undetectable for tracked targets.
The disadvantage is sensitivity to weather conditions. System will not work in the fog and in case of high clouds, rain or snow, the distance from which object can be detected and identified will be reduces. However, because most of UAVs are small and fly low they are also sensitive to the same weather conditions. They cannot fly when conditions are hard. So, lower ability of system to detect flying objects is not so important.
The main component of optical detection system is camera sensor with very high resolution. In this documents we will use data of optical sensor of CANON company with resolution 250 Millions of pixels (125 times more than HD television). Horizontal resolution is equal to 19.580 pixels and vertical is equal 12.600 pixels.
System is destined to scan airspace defined as top hemisphere, 360° horizontally and 90° vertically.
We propose three versions of system: 1.5Billion pixels (1.5G), 3 billion pixels (3G) and 6 billion pixels (6G).
The main task of the system is detection of the movement in field of view of the detector, determine the angular position of detected object, relative to position and orientation of the detector. Then course and speed of objects is determined and sent to Operational Center with annotation that it is preliminary detection without identification of objects.
Next task is identification (when objects will come near) by comparing with data base. After identification detailed data about objects (manufacturer, model, technical features and possible user) are sent to Operational Center.
When object will come closer system will detect signs of nationality, military or civil service etc. and will transmit data to Operational Center.
To measure distance, ceiling, course precisely, at least two detectors placed apart are necessary. We recommend to use three detectors, placed in the vertices of triangle because it will allow obtain good quality of measurement independent of the position of object relative to detectors. Stereoscopic system is build that way. Precision depends of distance between detectors and distance to object. The closer distance to object the higher quality of detection.
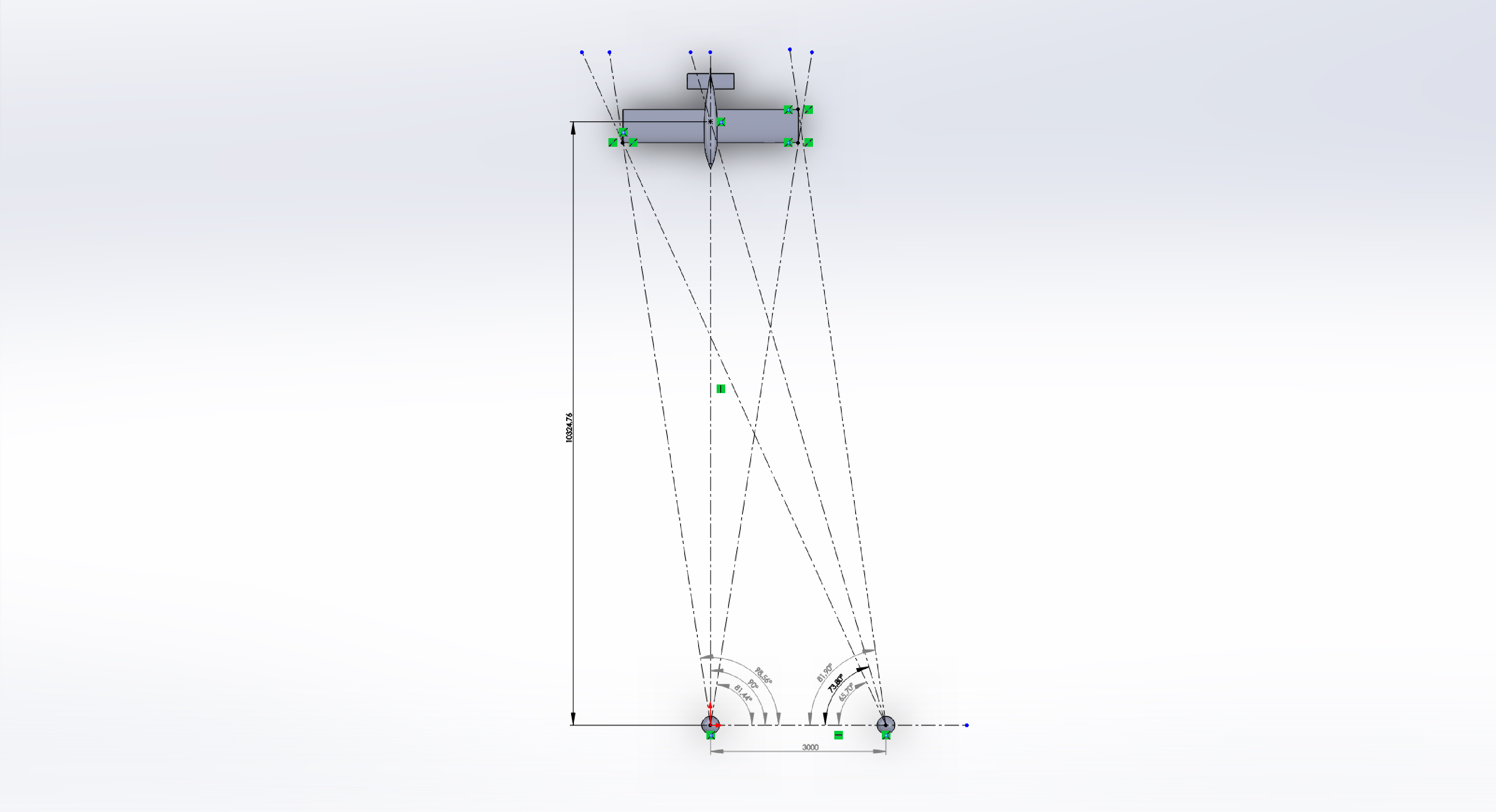
Picture is showing top view on two detectors and Flying vehicle. Knowing distance between detectors and measured angles can be computed distance to the object and its position relative to detectors as well as its dimensions.
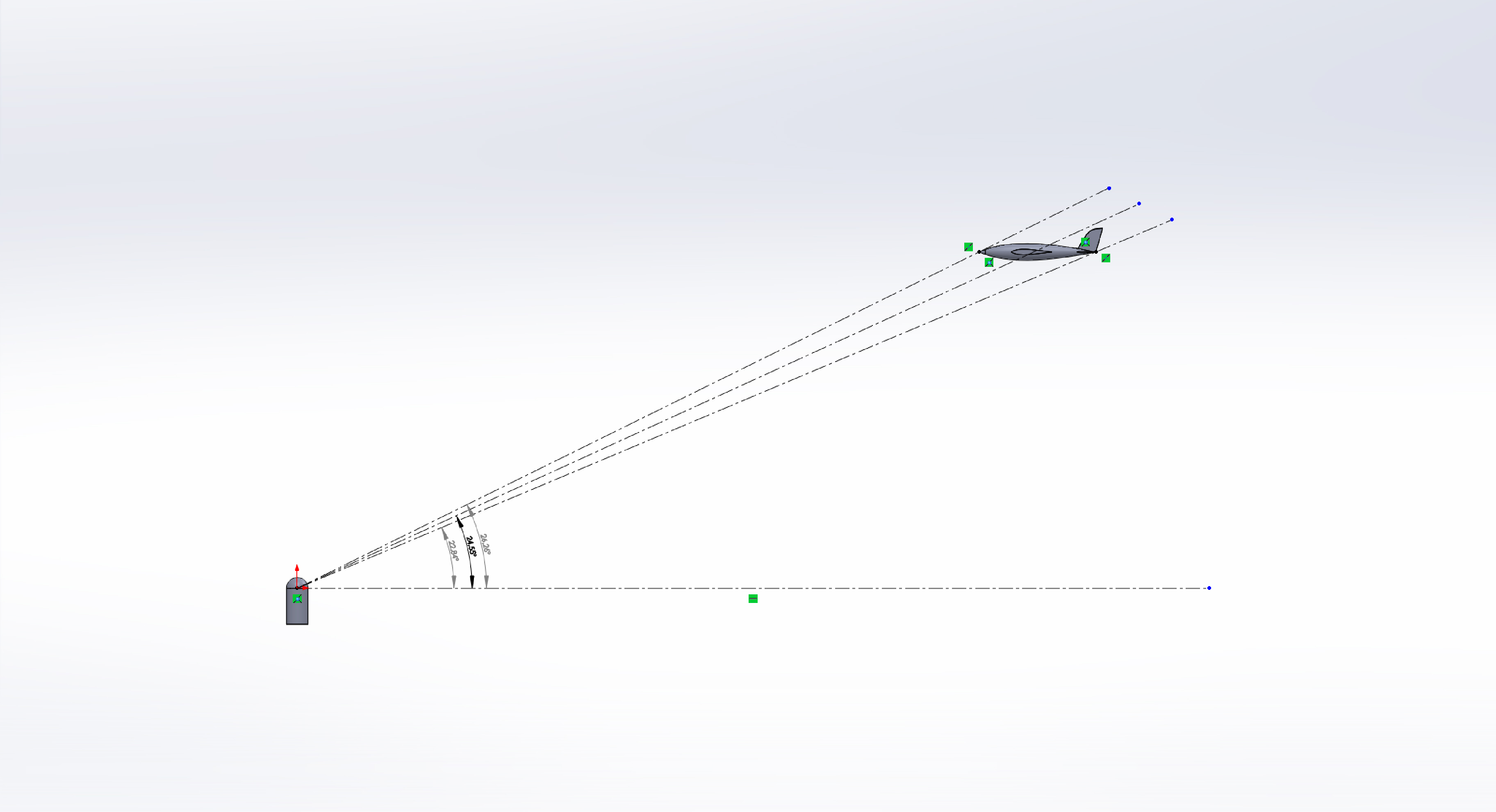
Picture is showing side view from the first detector. Knowing distance to object and measured angles can be computed ceiling and its dimensions.
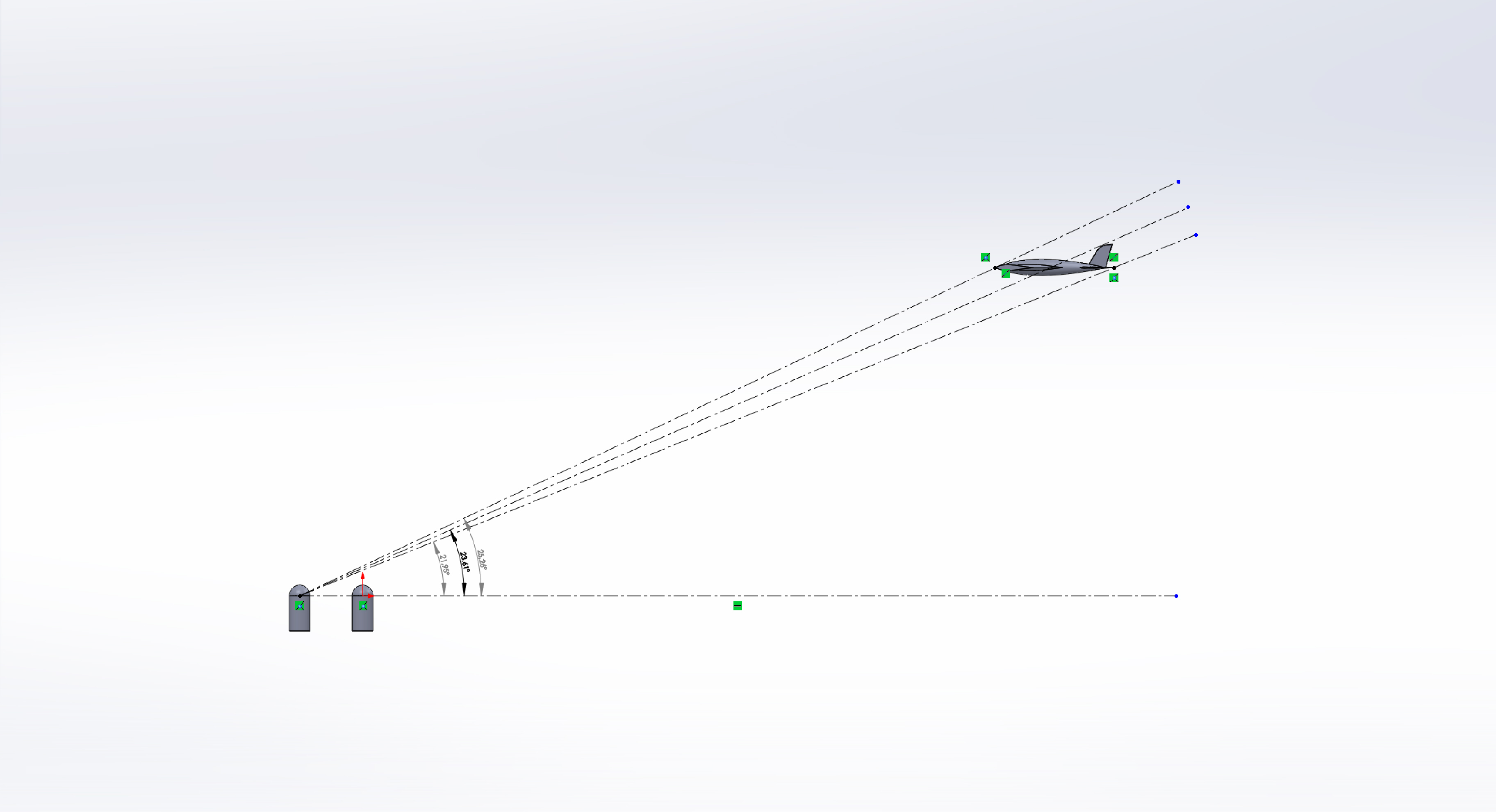
Picture is showing side view from the second detector. Knowing distance to object and measured angles can be computed ceiling and its dimensions.
Above picture shows how measuring only angles can be determined position of object relative to detectors. Knowing geographic position of detectors, we can compute position of objects on the map. Successive positions of objects allow determine object’s speed and course.
The key parameter to obtain high accuracy of the system is use sensors with extremely huge resolution. The higher is resolution, the bigger is maximum distance from which object can be detected and identified and the accuracy of position, speed and course.
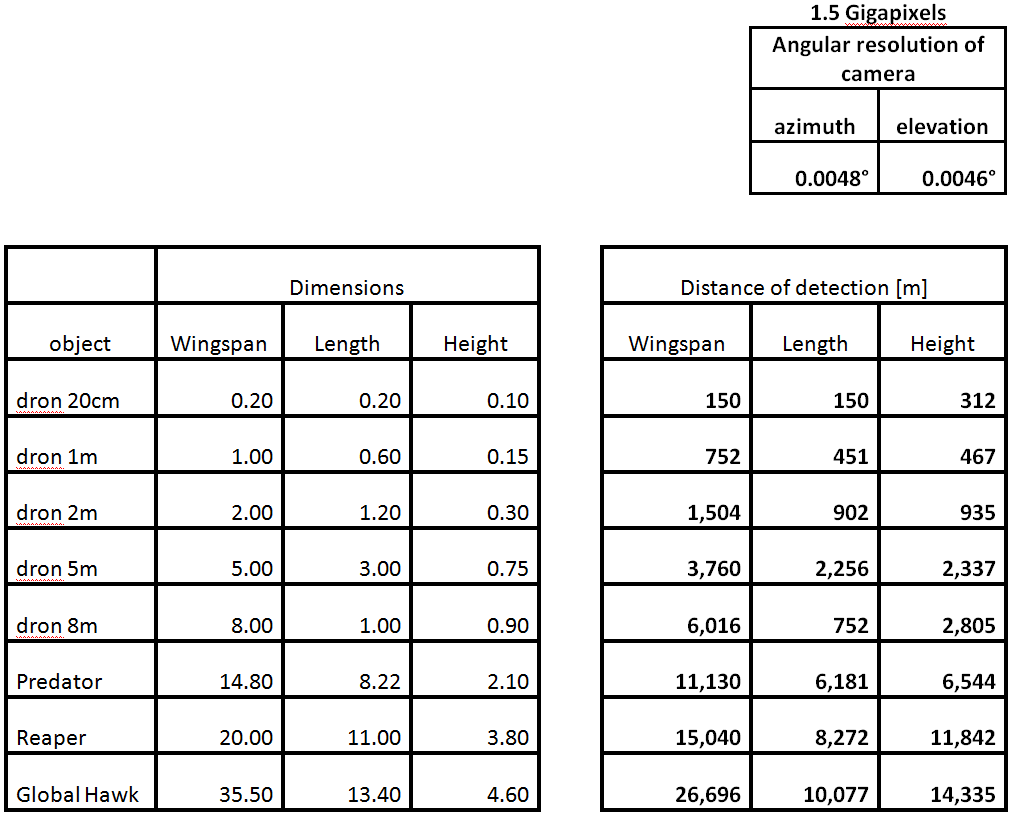
Above tables shows distance of detection of objects having different dimensions by a detector having 1.5 billion pixels. Horizontal angular resolution is equal to 0.0048° and vertical angular resolution is equal to 0.0046°.
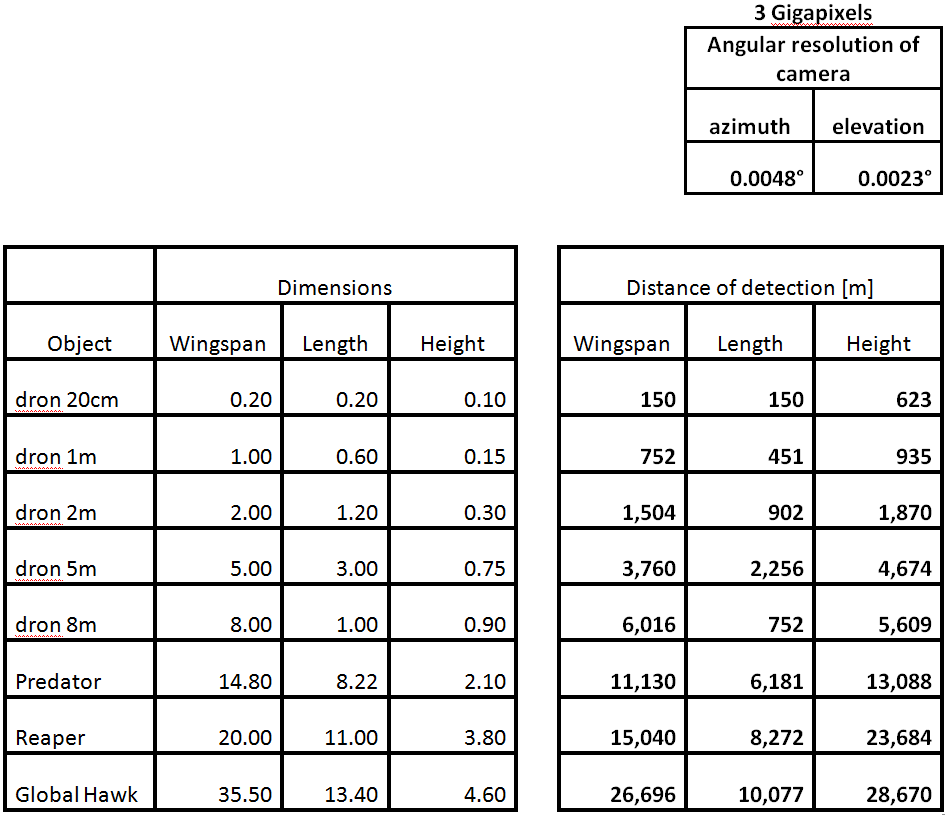
Above tables shows distance of detection of objects having different dimensions by a detector having 3 billion pixels. Horizontal angular resolution is equal to 0.0048° and vertical angular resolution is equal to 0.0023°.
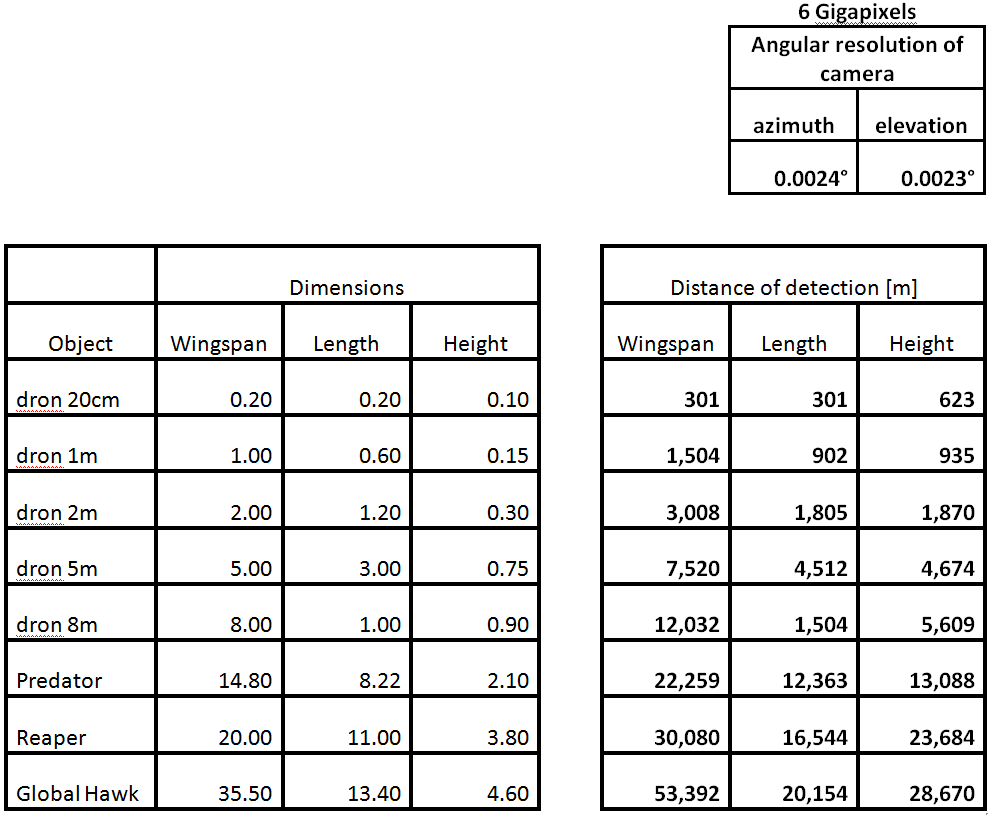
Above tables shows distance of detection of objects having different dimensions by a detector having 6 billion pixels. Horizontal angular resolution is equal to 0.0024° and vertical angular resolution is equal to 0.0023°.
Above results was estimated based on assumption that minimum detectable object has size (in pixels) 16x16x4. Smaller objects will be ignored as a noise. Tests of prototypes will tell us what is real minimum size of the object which can be used. We expect that they will be smaller and assumed, thanks of that maximum distance of detection will be bigger.
Current stage of Project does not allow us to predict what will be maximum distance of identification of objects. We have to build data base of three dimensional models of drones and airplanes and them make simulations, modeling different situations of objects detection and identification. Simulation will give us estimation of identification distance for different flying objects. Some drones are similar (shape is similar), for example Predator and Reaper. To determine which is observed their size should be taken into consideration.
In Operational Center should be placed monitor showing map with symbols describing detected objects and others where will be presented scaled up objects seen by camera of detector. Additional information should be displayed like manufacturer, model, most probable user etc.
Video from detector should be recorded in real time on hard disks for future analysis and to improve automatic identification algorithm. The condition of recording of such huge video frames (billions of pixels) on existing storage devices is very high compression of video data.
At the moment exist only one video compression technology allowing create Gigapixel Video – HD3 developed by Patents Factory Ltd. company. Estimations shows that for resolution of 1.5 Gigapixel, HD3 compression should generate bitrate about 20 Mbps. It is amount of data similar to needed for 4K video content coded with H264 codec in YouTube service.